About Trawl Positioning
 |
|
|
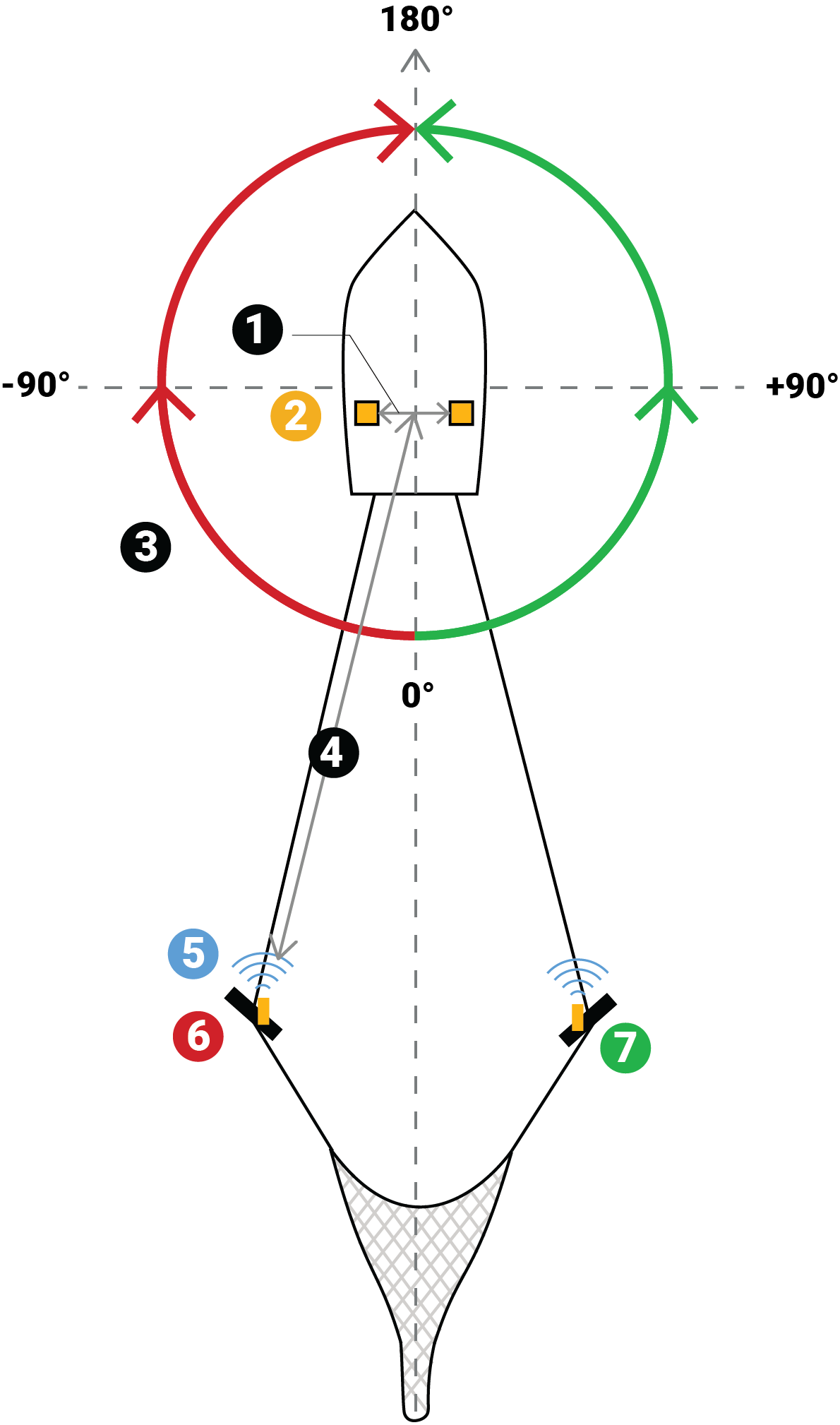
Positioning signal is sent after the depth signal (5). With this signal, the receiver can calculate the bearing angle (3) of the sensors placed on port (6) and starboard (7) doors. Angles are relative to the stern of the vessel. Angles toward port side are negative and angles toward starboard side are positive. For a Slant Range sensor (also called pinger), distance from the hydrophones to the doors (4) is calculated from the response time of the sensor to the hydrophone (2). For a Spread sensor, the distance is calculated from the warp
lengths. Scala application can calculate the
positioning of the trawl from this distance, the depth, the bearing angles, door
spread and GPS coordinates.
Note: Warp lengths can
be received from a winch control system, or entered manually in the control panels,
under Manual
Estimation. If no warp lengths,
the positioning will be calculated from the bearing, spread distance and depth data
sent by the Spread sensors. However, we strongly recommend to receive warp lengths from a winch control
system. Without it, the accuracy of the positioning will be
reduced.
The distance between the two hydrophones is called the baseline (1). |
For a basic system you need:
| 2 Slant Range sensors | 2 to 3 Spread Sensors |
|---|---|
| 1 M3/M4/M5/M6 receiver | |
2 receiving hydrophones:
|
|
| 1 transmitting hydrophone: passive hydrophone (ref. NC-1-05) | Warp lengths |
| Baseline calculation, Z angular offset | Baseline calculation |
| Scala2 with GPS and heading input | |
Important: The two receiving hydrophones must have a minimum
distance of 1 meter between each other.
Important: You need to remove the 50kHz notch filter on the wideband preamplifiers.
Important: On M4 and M6
systems, the receiving hydrophones must be both connected to a hydrophone input
between H1, H2 and H3 or both between H4, H5 and H6. The transmitting hydrophone for a Slant Range must be connected to a
different set of hydrophone inputs than the receiving hydrophones (for example, if the
receiving hydrophones are connected to H1 and H2, the transmitting hydrophone must be
connected to a hydrophone input between H4, H5 and H6).