Testing Relative Bearing Measurements
You can test if the relative bearing measurements are correctly calculated by the door sensors.
Testing Bearing at the Office
You can do a basic installation at the office to test the bearing measurements received from the door sensors.
Before you begin
- An operational system
- Two large-band active or passive hydrophones
- One door sensor (master or slave) with positioning option
Procedure
- Open the system web page and click Hydrophones.
-
Add the two hydrophones:
- Select the location of each hydrophones.
-
Set Rx/Tx to
Receive.

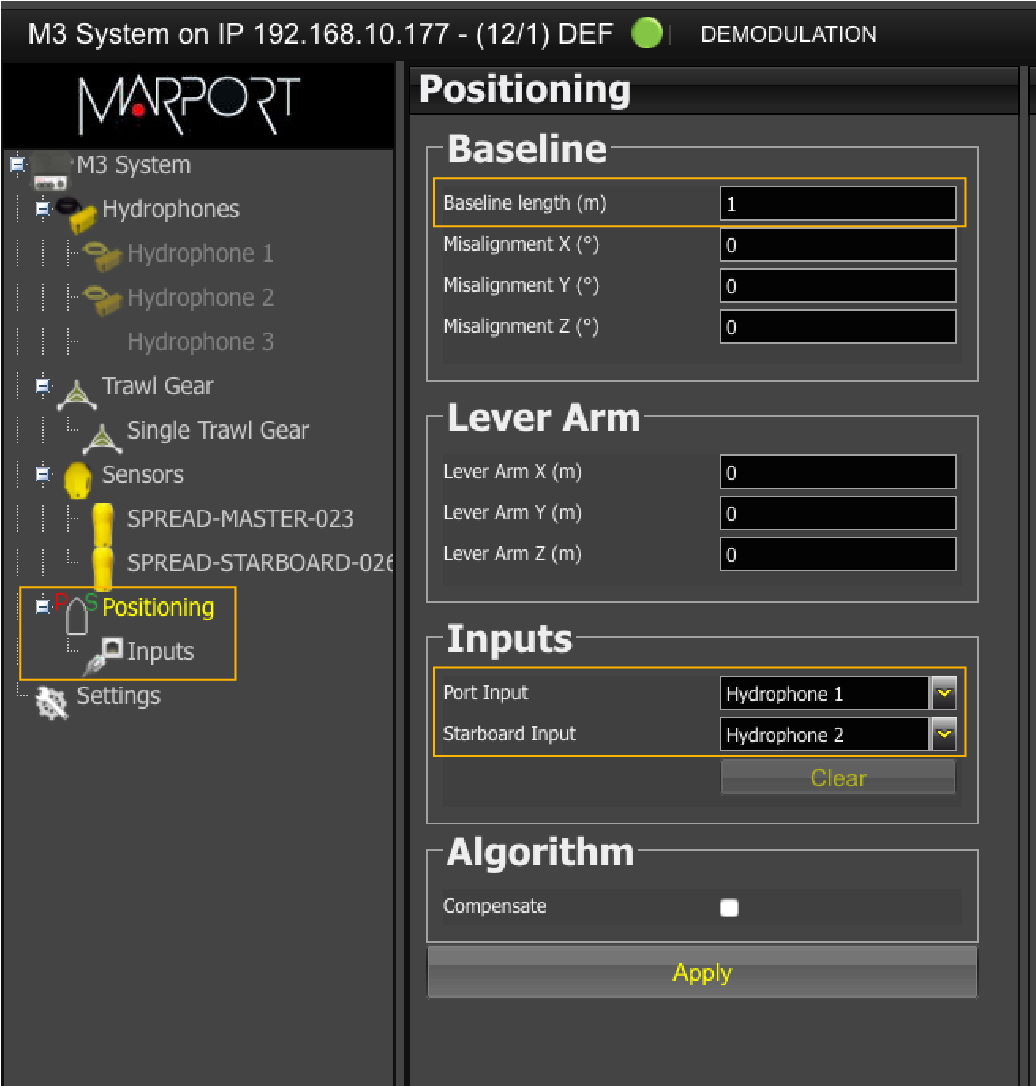
- Click Positioning.
-
Set the positioning settings:
- Enter a baseline of 1 meter and leave the other settings to 0.
-
In Inputs, enter the port and starboard
hydrophones.
-
Place the two hydrophones side by side and a few meters in front of a door
sensor. The sensor must be aligned with the hydrophones.

- From Scala2, check that the bearing measurements are +/- 1°.
-
Move back the starboard hydrophone of approximately 5 cm.
The bearing should be between -10° and - 15°.
-
Move back the port hydrophone of approximately 5 cm.
 The bearing should be between + 10° and + 15°.
The bearing should be between + 10° and + 15°.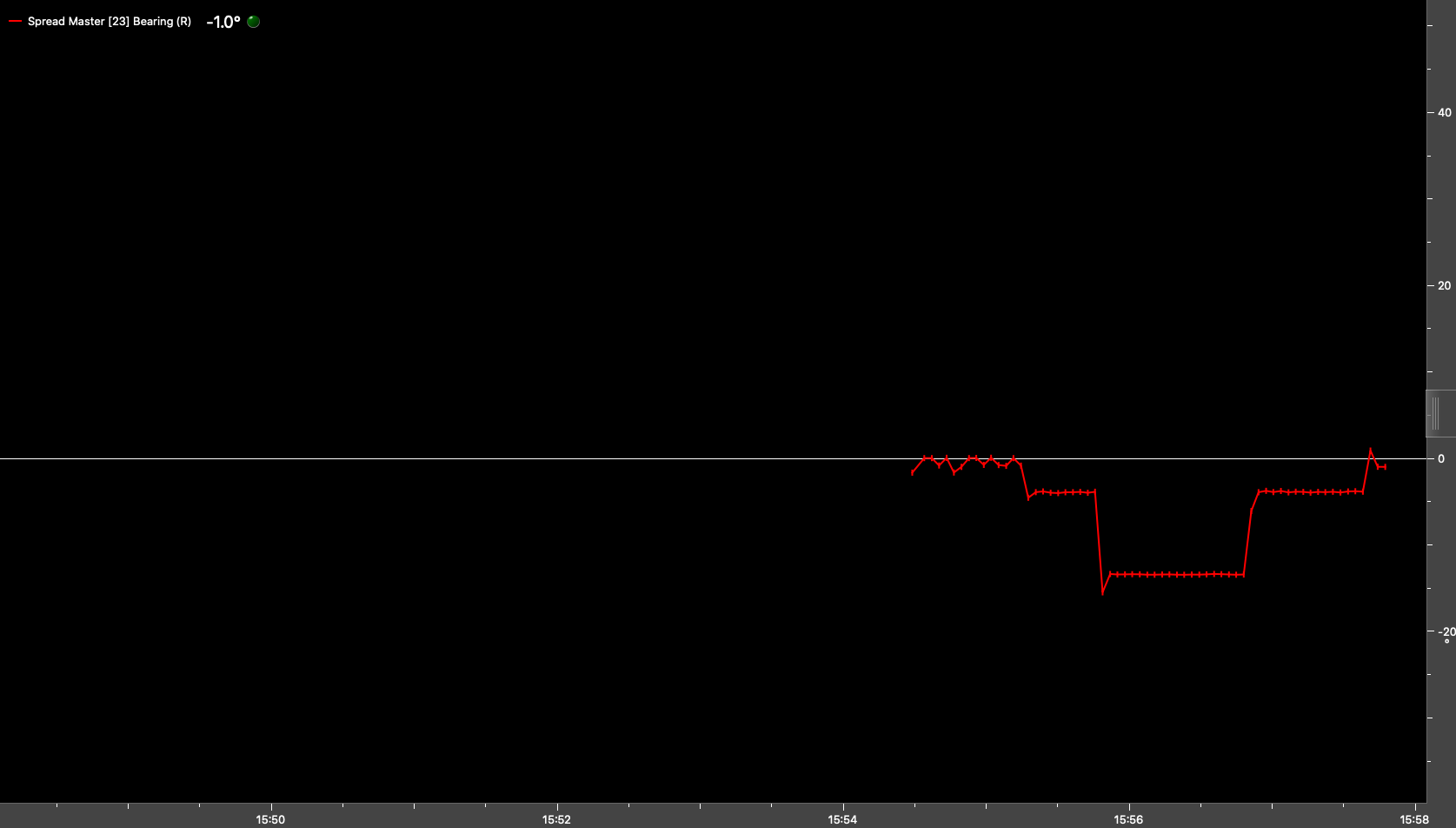 Trouble: If the data is outside the recommended values, check the following points:
Trouble: If the data is outside the recommended values, check the following points:- The baseline must be set to 1 meter.
- The sensor must be aligned with the hydrophones.
- The positioning settings in the receiver must be the same as the sensor's settings set in Mosa2.
Testing Bearing at the Harbor
You can test the bearing measurements at the harbor to make sure the system is coherent, from the hydrophone connection to the hydrophone settings in Scala2.
Before you begin
Procedure
- For each door sensor, tie a line to the front and a line to the back so that you can point them.
- Secure the lines to the stern with the Master sensor on port side and the Starboard sensor on starboard side.
- Place the sensors deeper than the vessel keel. The sides of the sensors with a circle/A must point toward each other and the uplink signal must point toward the hydrophones.
- On Scala2 bearing angles should be negative for the port sensor and positive for the starboard sensor.
- On Scala2 bearing angles should be above 180° for the port sensor and below 180° for the starboard sensor.
What to do next
Note: You can also test the bearing measurements while at sea: if the sensor in
water is correctly aligned with the hydrophones, the bearing should be +/- 2°.