Configuring the Uplink and Down Settings
You can configure different settings for uplink and down soundings.
Before you begin
About this task
Remember: Always click Apply after you change a setting and make sure there is a
green check mark  .
.
Procedure
Click the tab Trawl Explorer.
Uplink
Procedure
-
From TE Uplink
Frequency, enter a frequency
for the signal toward the vessel.
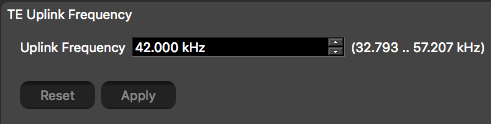 Important: This parameter must be the same in the sensor settings in Scala2.
Important: This parameter must be the same in the sensor settings in Scala2. -
You can add a delay to the update of data to increase battery lifetime:
-
Click Menu
 > Expert Mode
and enter the
password copernic.
> Expert Mode
and enter the
password copernic.
- From Delay Prp, enter a delay between 1 and 5 seconds.
-
Click Menu
Down Sounding
Procedure
-
For Catch Explorer V2 only: in NBTE Setup Options you can select Down 1 + Down 2 if you want to compare two
different settings on the down sounding (for example, two ping lengths
or 2 frequencies). The sensor will send two consecutive pings toward
down direction.
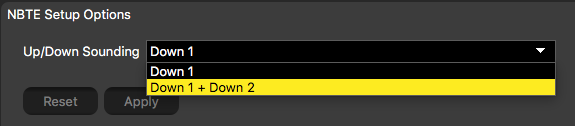 Note: Configure Down 1 sounding in Down settings and Down 2 sounding in Up settings (Up Sounding Range, Ping Up Length, Ping Up Frequency, Up channel minimum TS, Up TVG Mode, TVG Up).
Note: Configure Down 1 sounding in Down settings and Down 2 sounding in Up settings (Up Sounding Range, Ping Up Length, Ping Up Frequency, Up channel minimum TS, Up TVG Mode, TVG Up). -
From Down Sounding Range, select the range according to how many meters
you want to see under the sensor.
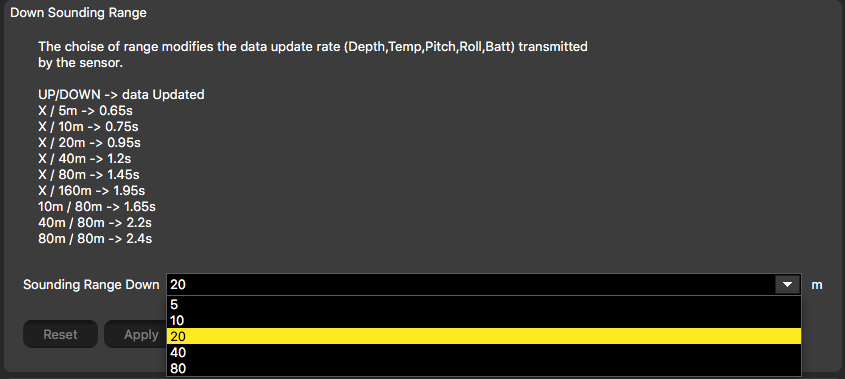 Note: Range influences the display of echogram images. The smaller the range, the shorter the listening time and the better the quality of images. But if you set a bigger range, data arrives slower which results in poorer image quality.Note: The range of the down sounding can automatically change to 20 meters if the distance to the bottom becomes lower than 20 meters and if you entered a trawl opening lower than 20 m. See next step to activate or not this feature.Important: This parameter must be the same in the sensor settings in Scala2.
Note: Range influences the display of echogram images. The smaller the range, the shorter the listening time and the better the quality of images. But if you set a bigger range, data arrives slower which results in poorer image quality.Note: The range of the down sounding can automatically change to 20 meters if the distance to the bottom becomes lower than 20 meters and if you entered a trawl opening lower than 20 m. See next step to activate or not this feature.Important: This parameter must be the same in the sensor settings in Scala2. -
If you want the range of the down
sounding to automatically change to 20 m when the bottom is closer (< 20
m):
- Make sure there is no delay set in Delay Prp.
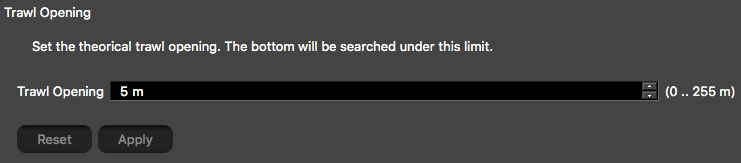
- Enter the height of the trawl opening. It must be lower than 18.5 m. This is to make sure the sensor will search for the bottom beginning from this distance. This way, the sensor will not confuse the bottom of the codend with the bottom of the sea. For example, if the bottom of the codend is at 4 meters, enter a greater distance, such as 5 meters.
Note: With the autorange feature, the echogram displays better quality images when the distance to the bottom is smaller. - If you do not want the range of the down sounding to automatically change, enter 20 m or more.
-
From Ping Down Length, enter a pulse length. Choose a
pulse length according to the distance at which you need to detect
fish. (the
longer the pulse, the further you can see, but with a lower
resolution):
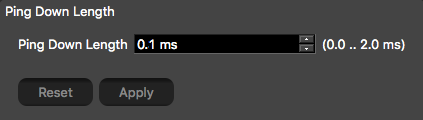
- Detection between 20 cm and 2 m: enter 0.1 ms (recommended for Catch Explorer sensors)
- Detection above 50 cm: enter 0.4 ms.
Note: The maximum detection depth depends on ping frequency and type of bottom. The lower the ping frequency is, the longer the detection depth is. -
From Ping Down
Frequency, enter a frequency for the
down sounding.
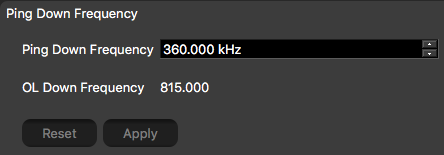 Important: Frequency needs to be between 360-400 kHz.Important:
Important: Frequency needs to be between 360-400 kHz.Important: Do not change ping frequency on a V3 sensor or it will have to be returned to a Marport sales' office for target strength
calibration.
Do not change ping frequency on a V3 sensor or it will have to be returned to a Marport sales' office for target strength
calibration.
Target Strength
Procedure
-
 For V3 version of sensors, Down channel minimum
TS helps you
detecting targets on the echogram. You can put -79 dB if you want to detect
small targets. Otherwise, leave the default settings at -73 dB.
For V3 version of sensors, Down channel minimum
TS helps you
detecting targets on the echogram. You can put -79 dB if you want to detect
small targets. Otherwise, leave the default settings at -73 dB.  Important: This parameter must be the same in the sensor settings in Scala2.
Important: This parameter must be the same in the sensor settings in Scala2. -
Select the appropriate TVG (Time Variable Gain) mode. See About Time Variable Gain for more information.
For V3
version of sensors, go to Down TVG Mode:
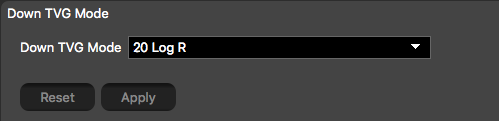
- 20 log: focus on bottom or school of fish (recommended for Catch Explorer).
- 40 log: focus on individual targets.
- 30 log: compromise between the two above settings.
 For V2 versions of sensors, go to TVG Down:
For V2 versions of sensors, go to TVG Down: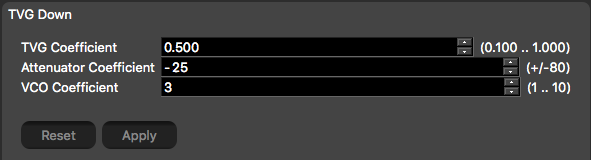
- In TVG Coefficient, enter between 0.500 and 0.520 to have approximately the equivalent of 20 log (recommended for Catch Explorer), 0.75 for 30 log or 1 for 40 log.
- In Attenuator Coefficient, enter between -15 and -25. This coefficient is specific to Catch Explorer sensors.
- Leave VCO Coefficient default settings at 3.