Configuring the Sensor Settings
Seine Explorer
Important: Make sure the settings you enter here are the same
as in Mosa2.
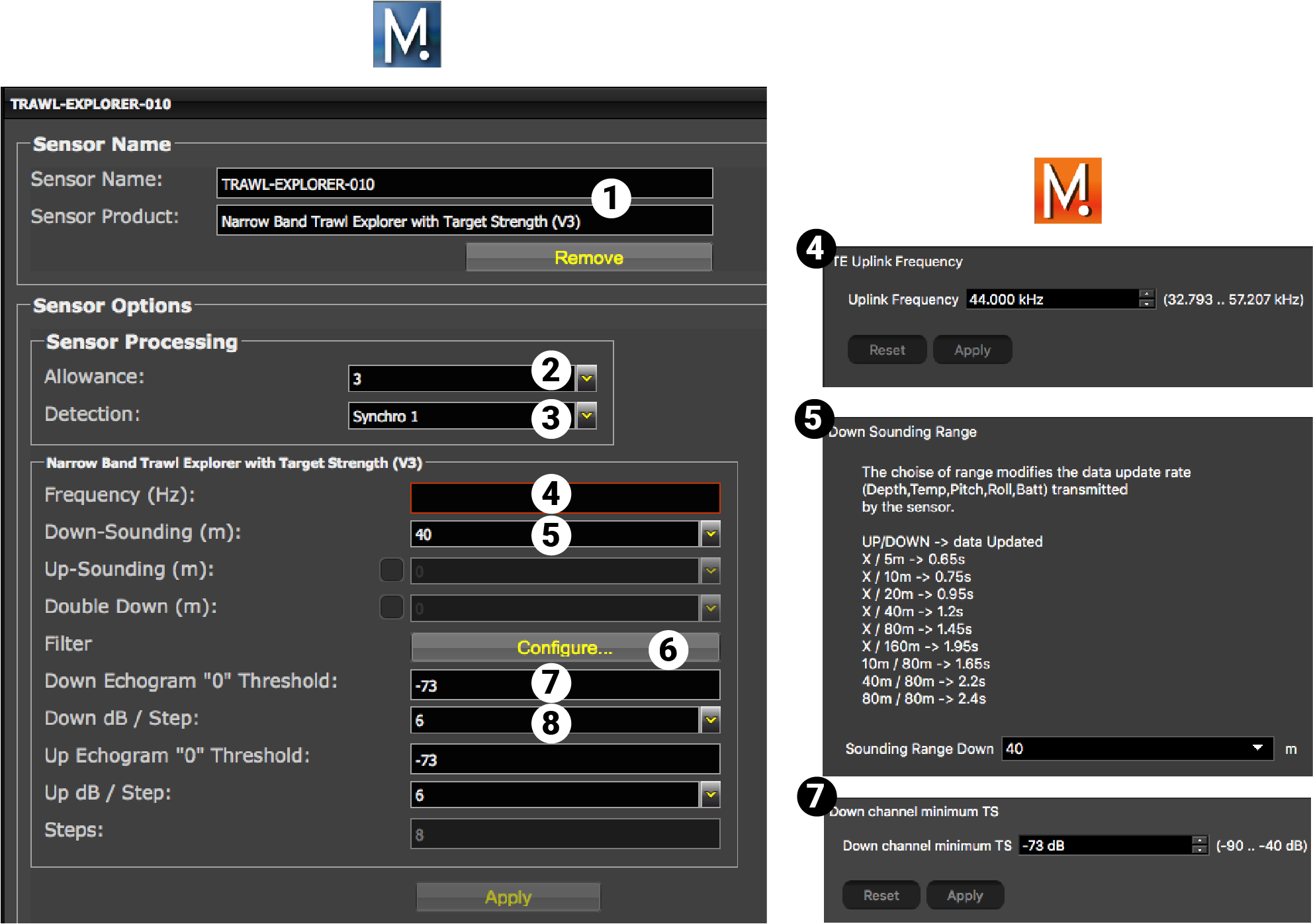
| 1 | Sensor name displayed in Scala2 and its features. |
| 2 | This setting helps detecting the signal of the sensor among other sensor or echosounder
signals. Change default setting only if you have issues receiving data.
|
| 3 | This setting also helps detecting the sensor signal. Leave default setting at Synchro 1. |
| 4 | Enter the same frequency as the one entered for the uplink frequency in Mosa2. |
| 5 | Select the range of Down sounding from the drop-down menu. Select Up-Sounding if the sounding mode of the sensor is Down 1 + Up. Then, select the range of Up (side-looking) sounding.Select Double Down if the sounding mode is Down 1 + Down 2. Then, select the range of Down 2 sounding. |
| 6 |
Click Configure to change filters
applied on incoming data. Filters are particularly useful to reduce interferences on the
echogram data.
Tip: Please refer to Scala2 user
guide for more information about the filters.
|
| 7 | Helps you detecting targets on the echogram. Corresponds to Channel minimum TS in Mosa2. |
| 8 | Do not change this setting. |
Seine sensors with depth and other options
Note: The picture below shows a Seine sensor with height,
depth and temperature options.
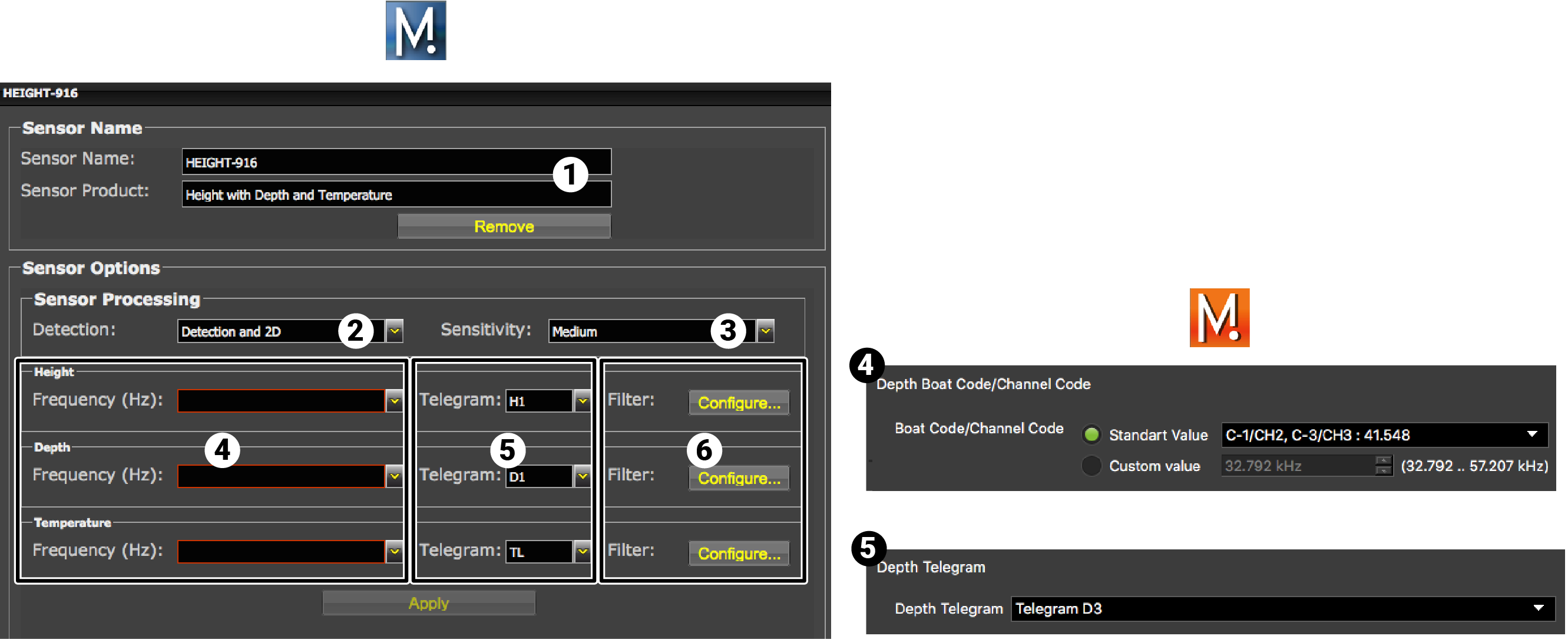
| 1 | Sensor name displayed in Scala2 and its features. |
| 2 | This setting helps detecting the signal of the sensor among other sensor or echosounder
signals. Change only if you have issues receiving data.
|
| 3 |
|
| 4 | Enter the same frequencies as those entered in Mosa2 for each option in Boat Code/Channel Codes. |
| 5 | Enter the same telegrams as those entered in Mosa2 for each option. |
| 6 |
Click Configure to change filters applied on incoming data. |
Results
The sensor is added to the system. You should see incoming data from the control panels, in Sensors Data. You can now configure the display of incoming data in Scala2.