Calculations for Positioning System
When configuring the positioning system on the system web page (Scala2 receiver page), you must consider the position of the hydrophones. When they are misaligned, you can calculate their misalignment angles with the following calculations.
Receiver firmware below version 08.01: There are two misalignment angles that you should calculate. Misalignment Z is the more critical for correct positioning data. Make sure these calculations are correct if you enter them in Scala2.
Receiver firmware from version 08.01: Calculate misalignment Z only.
The drawings below show the misalignment angles and how to calculate them:
| Misalignment X (angular offset around X axis) | Misalignment Z (angular offset around Z axis) |
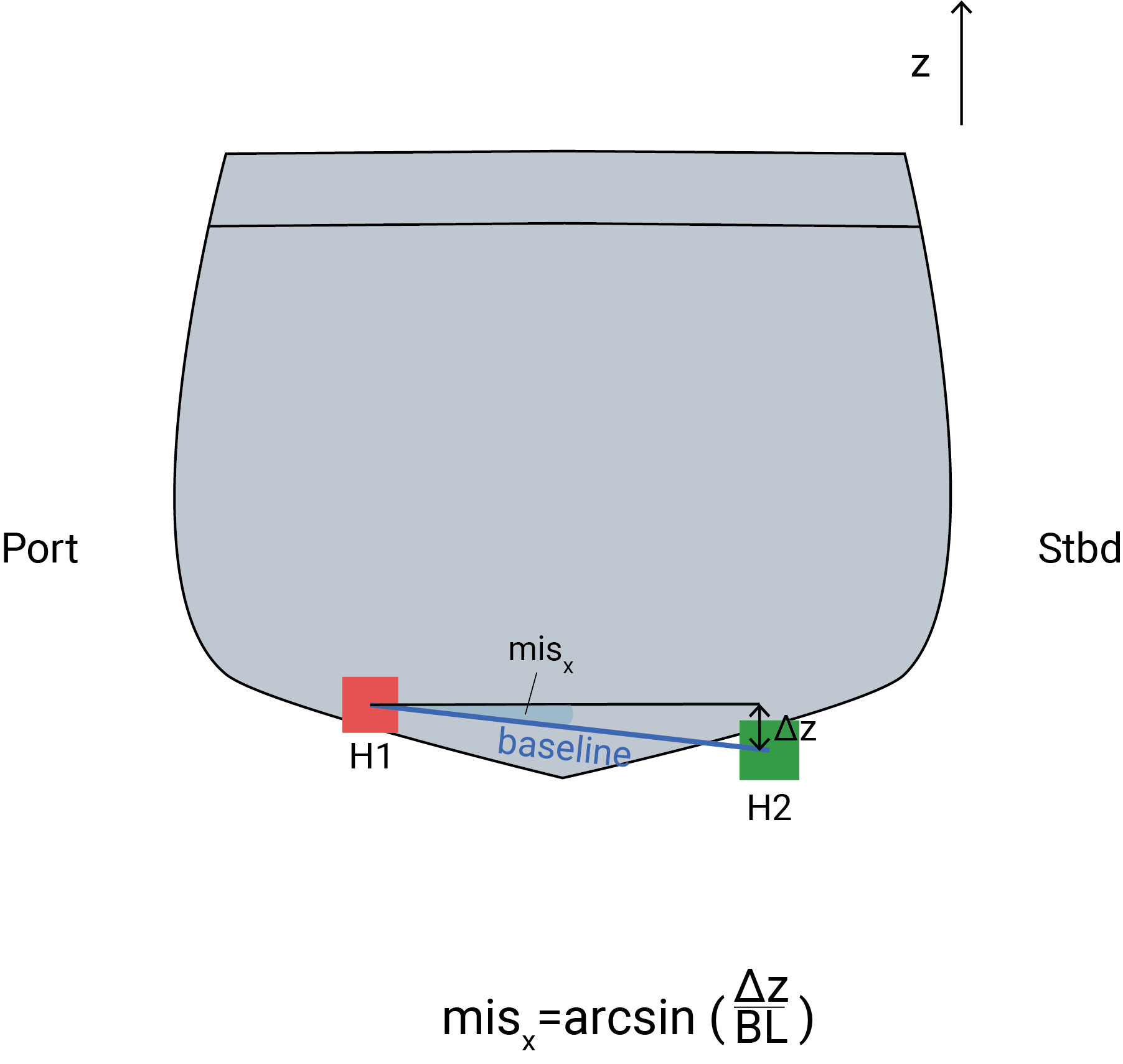
|
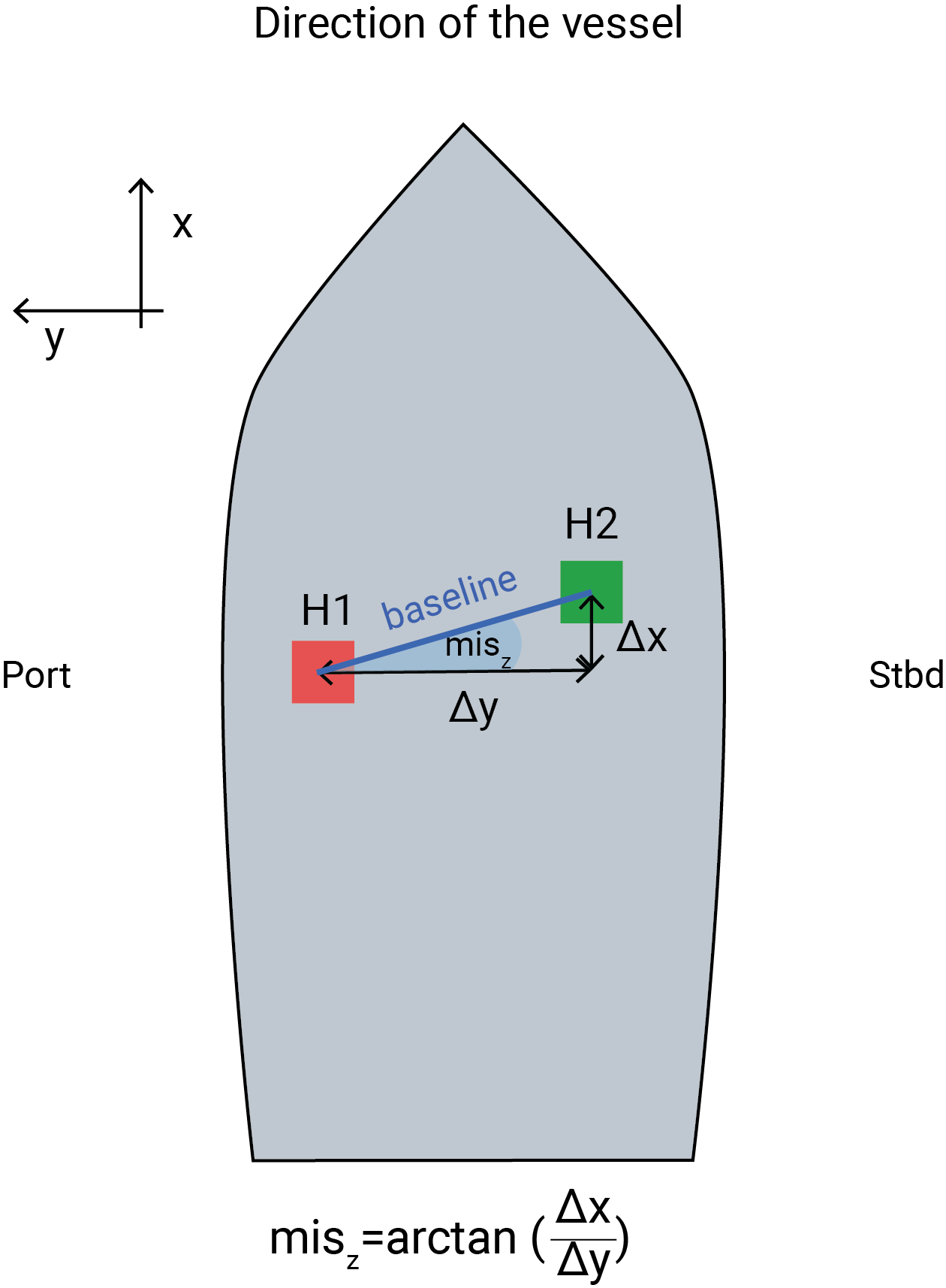
|
Sign of Angles
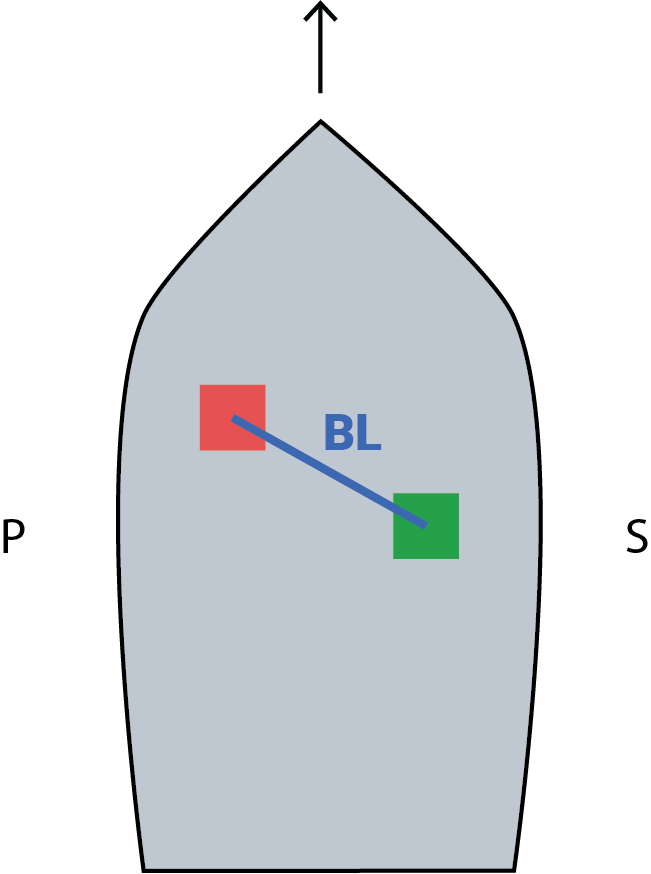
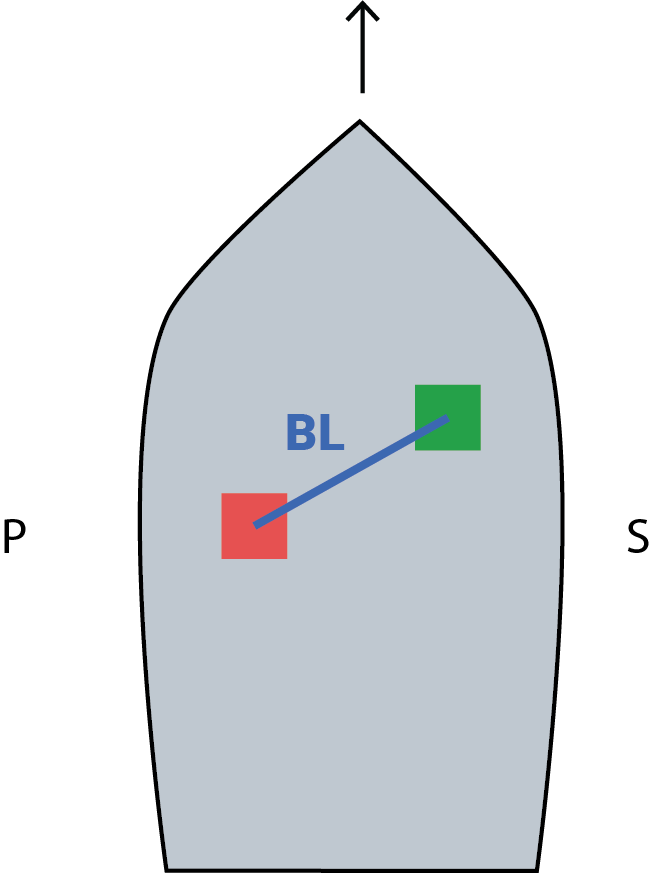
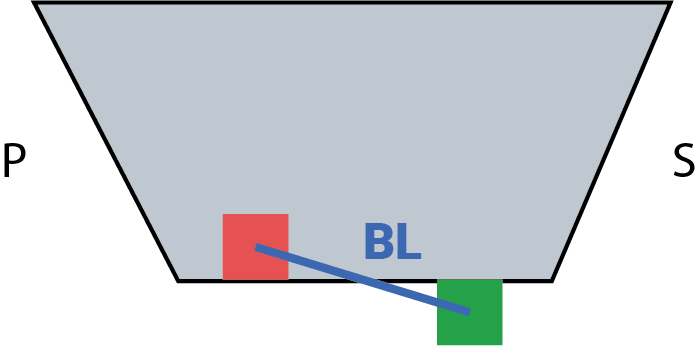
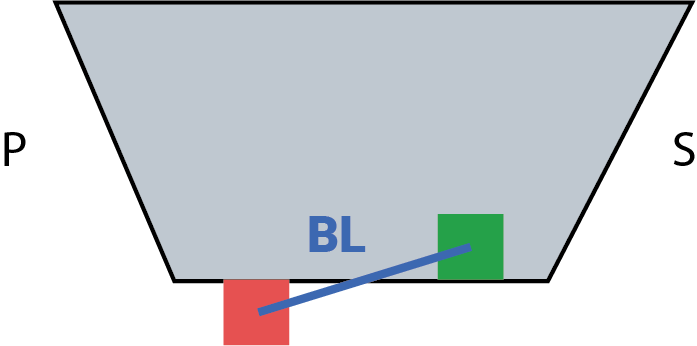
Once you have calculated X and Z misalignment angles from the above formulas, you need to add a positive or negative sign to the result. The sign depends on the offset of the hydrophones. Refer to the drawings below to know if you need to add a negative or positive sign to misalignment Z and X. The sign of the angles is important to receive correct positioning data.
|
|
| Negative sign (-) | Positive sign (+) |
|
|
| Negative sign (-) | Positive sign (+) |