Configuring the Positioning Settings
You need to configure the positioning settings on the system web page (receiver page on Scala2.
Before you begin
Tip: A spreadsheet is available on Marport support website to help you complete this
page: go to the Useful Resources page.
Procedure
-
From the left side of the screen where the system is displayed, click
Positioning.
 The positioning configuration page appears.The page is different depending on the receiver firmware version:
The positioning configuration page appears.The page is different depending on the receiver firmware version:Figure 1. Receiver firmware below version 08.01 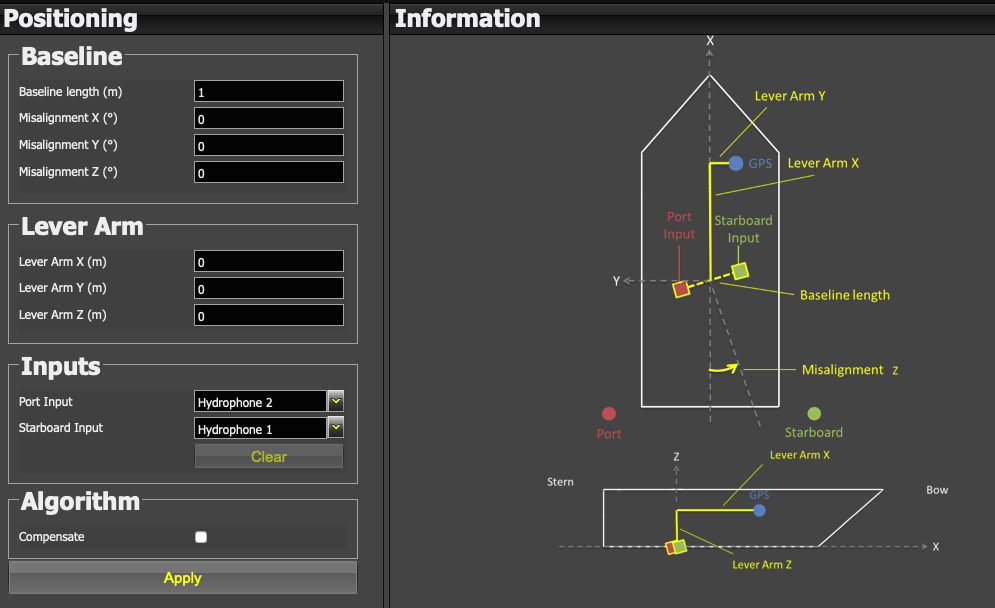
Figure 2. Receiver firmware from version 08.01 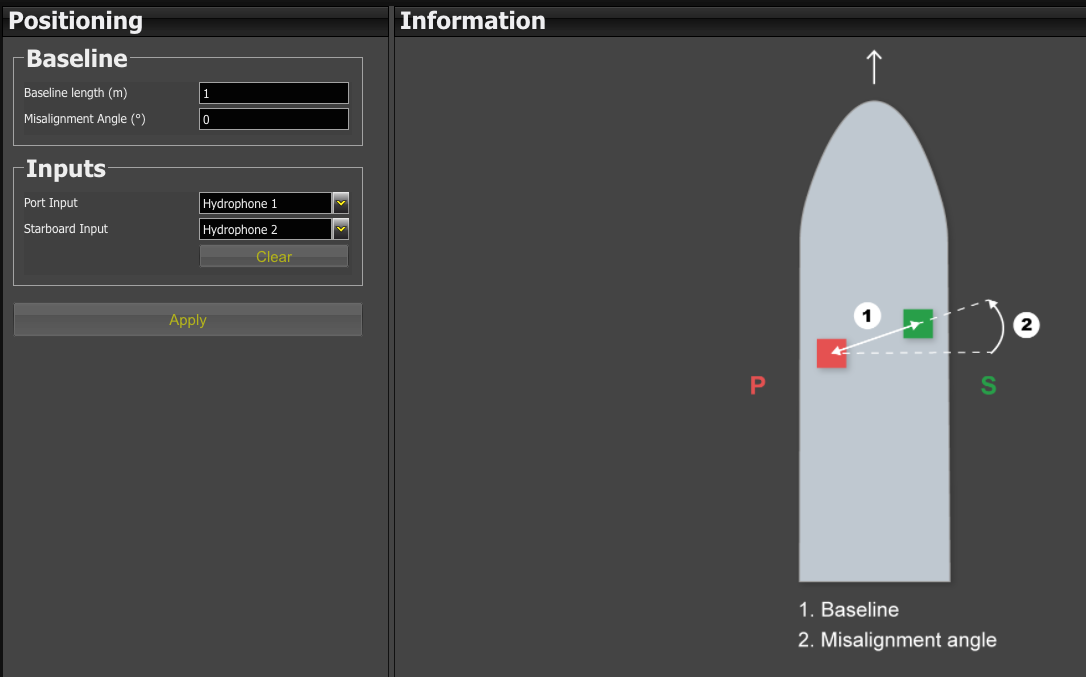
-
In Baseline, enter the
baseline distance and the misalignment angles:
- Enter the distance between the two receiving hydrophones in Baseline length.
-
Receiver firmware below version 08.01: You can complete the
misalignment X and Z, for more accurate positioning. See Calculations for Positioning System. Otherwise, you can enter 0. Enter 0 for the misalignment Y.
- Receiver firmware from version 08.01: Enter the misalignment angle shown on the drawing.
Note: The baseline is very important to have accurate positions of the doors. -
Receiver firmware below version 08.01: In Lever Arm, leave 0 in the fields.
-
In Inputs, enter the port and
starboard hydrophones, according to the hydrophone configuration.
 Note: On M4 and M6 systems, the receiving hydrophones must be both connected to a hydrophone input between H1, H2 and H3 or both between H4, H5 and H6.
Note: On M4 and M6 systems, the receiving hydrophones must be both connected to a hydrophone input between H1, H2 and H3 or both between H4, H5 and H6. -
Receiver firmware below version 08.01: In Algorithm, select Compensate if you entered misalignment values in Baseline.
- Click Apply.