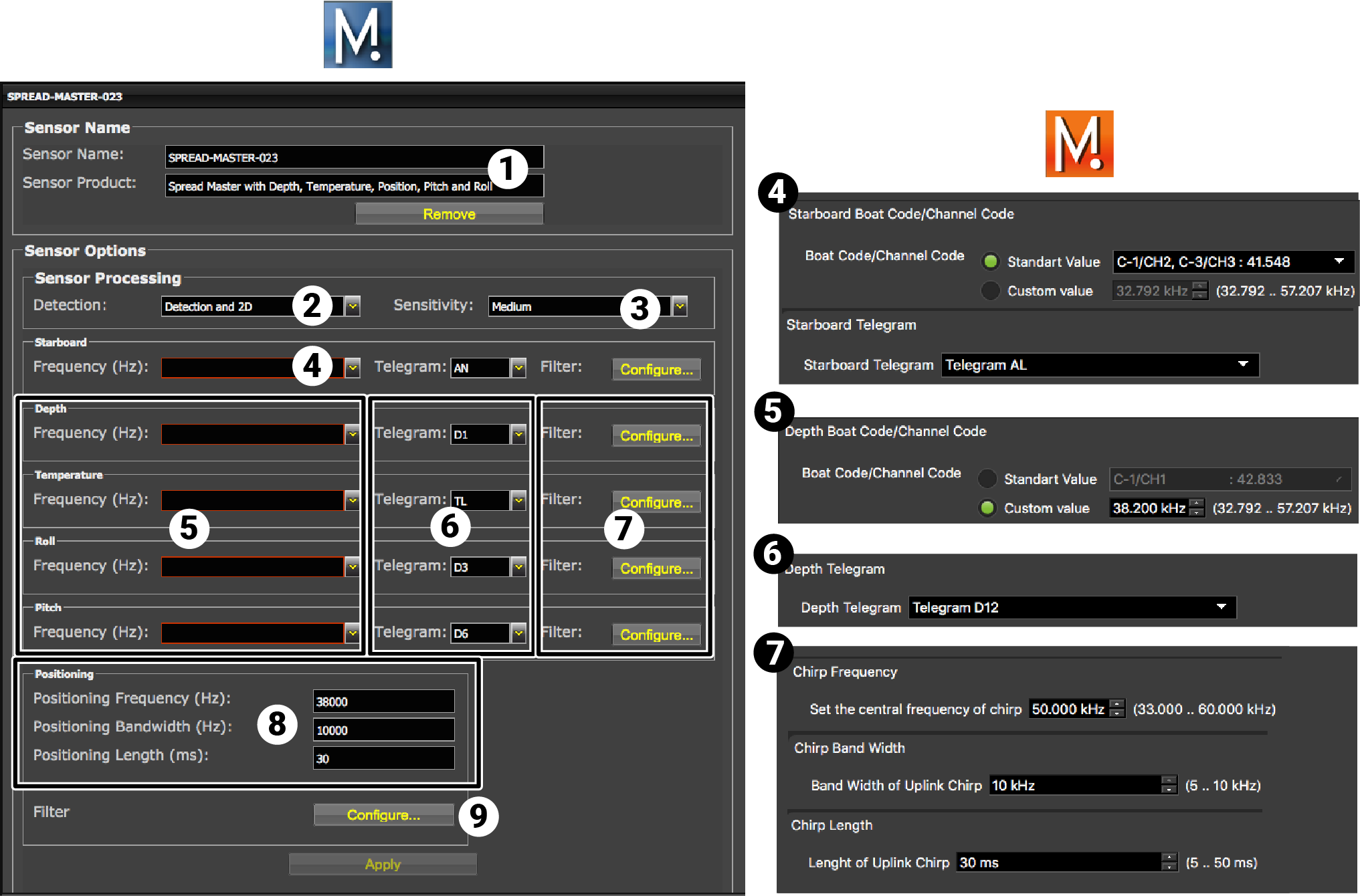
| 1 |
Sensor name displayed in Scala2 and
its features. |
| 2 |
This setting helps detecting the signal of the sensor among other sensor or echosounder
signals. Change only if you have issues receiving data.
- Detection and 2D: default value. This setting helps
distinguishing the sensor signals when there are a lot of interferences (e.g.
echosounders). It selects the correct signals according to very selective criteria.
- Detection: If you do not receive data, it may be
because the Detection and 2D setting is too selective with the
signal. Detection is less selective and allows more signals to be
received.
- Detection for Seiner: no need for this sensor
|
| 3 |
- Low: if the signal of the sensor is high = the trawl is close to
the vessel (SNR min. 18 dB).
- Medium: Default setting. Compromise between the two other
settings (SNR min. 12 dB).
- High: if the signal of the sensor is low = the trawl is far from
the vessel (SNR min. 6 dB).
|
| 4 |
Master and clump sensors only: enter the same frequencies and telegrams as
those entered in Mosa2. |
| 5 |
Enter the same frequencies as those entered in Mosa2 for each option. |
| 6 |
Enter the same telegrams as those entered in Mosa2 for each option. |
| 7 |
Click Configure to change filters applied on incoming data.
|
| 8 |
Enter the positioning parameters you entered in Mosa for
Chirp. |
| 9 |
Click Configure to change filters applied on
positioning data. |